![A logo representing a calm, happy Sweden countryside village with only blue color palette [and has a minimalist and modern style] [incorporating elements of nature] [with a touch of Scandinavian design] [that reflects a sense of community]](https://raonstad.com/wp-content/uploads/2024/03/img-rsVXmvlyKd0umO7b2rMmaUnI.png)
테슬라 옵티머스 Gen-2 – 두번째 이야기
앞의 포스트에 이어서 새로운 옵티머스 Gen-2 테슬라 휴머노이드의 의 주요 개선점에 대해 이어서 포스팅 해 보겠습니다.
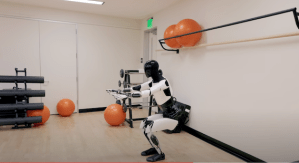
옵티머스 Gen-2 개선된 균형 감각과 전동체 제어기능

테슬라 사의 소계 동영상에는 테슬라의 옵티머스 Gen-2가 “스쿼트” 동작을 하는장면이 나옵니다.
로봇이 스쿼트 동작을 수행하기 위해서는 어떤 부품이 조화롭게 동작해야 하는지 추정하기 위해 사람이 스쿼트 동작을 하기 위해 필요한 근육과 신경과 비교를 해보도록 하겠습니다.
스쿼트 동작시 필요한 근육들의 종류
사람이 스쿼트 동작을 하기 위해 필요한 근육은 일반적으로 대퇴사두근, 햄스트링, 둔근 그리고 종아리 근육이 쓰인다고 알려져 있습니다.
대퇴사두근은 무릎을 펴는 역할을 하는 근육으로, 스쿼트 동작에서 가장 많이 시용되는 근육입니다.
또한 축구 선수들이 자주 부상을 입는 부위로 유명한 햄스트링은 무릎을 구부리는 역할을 하는 근육입니다.
이밖에, 둔근은 골반을 뒤로 밀어주는 역할을 하는 근육이며, 종아리 근육은 발목을 굽히는 역할을 하는 근육입니다.
액추에이터를 사용한 구현 측면
옵티머스 Gen-2의 액추에이터가 위에서 이야기한 사람의 근육을 대신한다고 가정해 봅시다.
실제로 로봇이 스쿼트 동작을 하기 위해서는 위에 언급된 4개의 근육에 해당하는 액추에이터들이 서로 균형을 맞추며 움직여야 합니다.
굉장히 난이도가 높은 작업입니다.
지난 3월에 엉성하게 움직이던 동작을 이렇게 획기적으로 개선한 점을 고려하면 발전 속도만으로도 대단하다고 생각됩니다.
옵티머스 Gen-2 – 더 빠르고 자연스러운 손
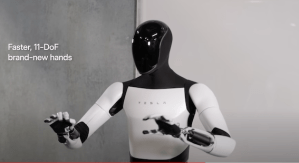
Degree of freedom(DOF)는 관절의 자유도를 의미합니다. DOF가 높을수록 로봇 손은 보다 정교한 동작을 수행할 수 있습니다.
그러나, DOF가 높을수록 로봇 손의 구조는 복잡해지고, 제작과 제어가 어려워집니다.
DOF11의 옵티머스 Gen-2 손의 의미
따라서, 로봇 손의 DOF를 적절하게 설정하는 것이 중요합니다.
주로 힘과 내구성이 강조되는 산업용 로봇 손의 경우, DOF는 5~7 정도가 일반적이라 알려져 있습니다.
이는 다양한 물체를 집거나 조작할 수 있을 정도의 DOF를 갖추면서도, 제작과 제어가 용이하기 때문입니다.
수술이나 재활 치료에서는 사람의 손과 같은 정교한 동작이 필요한 의료용 로봇 손의 경우, DOF는 10~15 정도가 일반적입니다.
이는 사람의 손과 같은 정교한 동작을 수행하기 위해 필요한 DOF이기 때문입니다.
따라서 11개의 자유도를 가진 테슬라 옵티머스 2세대는 의료용 로봇 손과 같은 정교한 동작을 수행할 수 있으리라 예상됩니다.
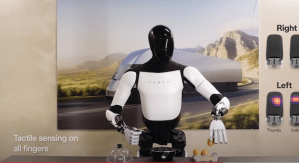
모든 손가락에 적용된 촉각 센서
센서기술과 로봇 손의 연관성
센서 기술은 로봇 손을 구현하는데 크게 영향을 미치는 주요 요소 입니다.
센서 기술의 발전으로 로봇 손은 물체의 형태, 무게, 질감, 온도 등을 보다 정확하게 감지할 수 있게 되었습니다.
이는 로봇 손의 정밀성과 섬세함을 향상시키는 데 중요한 역할을 했습니다.
그러므로, 로봇 손은 다양한 물체를 집거나 조작하기 위해 다양한 센서가 필요합니다. 따라서, 센서를 정밀하게 배치하고, 이를 효율적으로 제어하는 것은 로봇 손을 구현하는 데 큰 난이도를 가져옵니다.
로봇 손에 사용되는 힘,위치 그리고 촉각센서
이러한 센서 기술의 대표적인 예는 힘, 위치 그리고 촉각센서를 예로 들 수 있습니다.
- 힘 센서
- 로봇 손이 물체에 가하는 힘을 측정하는 데 사용됩니다.
- 이는 로봇 손이 물체를 안전하게 집거나 조작하기 위해 필수적인 센서입니다.
- 상용 제품으로는 압전 센서, 스트레인 게이지, 광학 센서 등이 있습니다.
- 위치 센서
- 로봇 손의 각 관절의 위치를 측정하는 데 사용됩니다.
- 이는 로봇 손이 정교한 동작을 수행하기 위해 필수적입니다.
- 상용 제품으로는 인크리멘털 엔코더, 자이로스코프, 가속도계 등이 있습니다.
- 촉각 센서
- 물체의 질감이나 온도 등을 감지하는 데 사용됩니다.
- 이는 로봇 손이 물체를 보다 세밀하게 다루기 위해 필요한 센서 입니다.
- 상용 제품으로는 압력 센서, 온도 센서, 광학 센서 등이 있습니다.
로봇 손에 사용되는 센서 주요 공급사

촉각 센서를 공급하는 대표적인 미국 기업은 다음과 같습니다.
- Tekscan (https://www.tekscan.com)
- Interlink Electronics (https://www.interlinkelectronics.com/)
특히, Tekscan은 세계 최대의 촉각 센서 제조업체로, 다양한 산업 분야에서 사용되는 촉각 센서를 공급하고 있습니다.
Interlink Electronics는 웨어러블 기기 및 의료 분야에서 사용되는 촉각 센서를 전문으로 생산하고 있습니다.
촉각 센서는 물체와의 접촉을 전기 신호로 바꾸는 역할을 하는데, 이 신호를 분석하여 물체의 질감, 모양, 크기 등에 대한 정보를 얻을 수 있습니다.
이러한 센서의 동작원리는 주로 압전 세라믹 소자를 사용한 압전식과 센서 내부의 광 도파관에서 산란된 산란광의 변화를 감지하는 방식이 사용됩니다.
테슬라의 2세대 옵티머스는 이러한 촉각센서를 모든 손가락에 가지고 있어 실제 사람이 느낄 수 있는 촉각을 전기 신호로 바꾸어 입력으로 사용할 수 있게 됩니다.
Delicate objects manipulation – 미묘한 물체 조작
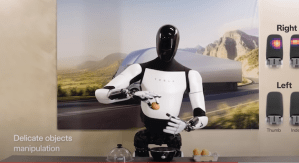
앞서 포스트의 마지막 부분에 옵티머스가 달걀을 집어 들고 한쪽에서 다른쪽으로 달걀을 깨지지 않도록 이동하는 모습을 보여 줍니다.
이러한 움직임은 앞서 설명한 현재 작업중인 물체가 달걀이라는 것을 인식하는 기술과 달걀이 깨지지 않도록 적절한 압력으로 달걀을 쥐는 모습, 그리고 손으로 쥔 달걀을 떨어뜨리지 않도록 균형을 잡아 다른쪽으로 이동하며 원하는 목표지점에 내려 놓는 모습을 보여 줍니다.
실제로 해당 동작이 달걀이라는 물체에 맞추어진 동작일 수도 있겠으나 앞으로 계속해서 발전되는 인공지능기술의 발전과 복잡하고 많은양의 연산을 해내는 테슬라만의 컴퓨팅 플랫폼인 도조 (DOJO) 그리고 이러한 데이터와 새로운 규칙(Rule)들이 실시간으로 통신되는 테슬라만의 인공위성 네트워크 시스템인 스타링크를 고려하면, 테슬라의 옵티머스 로봇이 가까운 미래에 어떠한 서비스와 비지니스 모델로 세상을 바꾸어 나갈지 기대가 됩니다.
테슬라의 첫 전기차는 Tesla Roadster로, 2008년에 처음으로 공개 되었고 대중화가 본격적으로 시작된 모델은 Model S라 볼 수 있습니다. Model S는 2012년에 처음으로 시장에 출시 되었으니 4년정도의 시간이 걸렸다는 점을 고려하면, 멀지 않은 미래에 우리의 주위에서 테슬라의 로봇을 볼 수 있을지도 모르겠습니다.





